









Controladora de vuelo Matek WING 405 V2 Inav-ardupilot
$215,000
Agotado
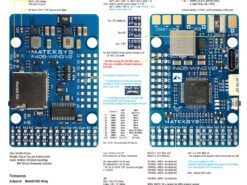
Especificaciones FC
- MCU: STM32F405RGT6, 168 MHz, memoria flash de 1 MB
- IMU: ICM42688-P
- Estudio: DPS310
- OSD: AT7456E
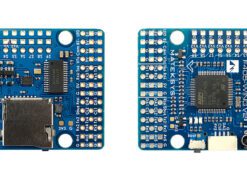
- Caja negra: ranura para tarjeta MicroSD
- 6x UART, 1x opción Softserial_Tx (INAV)
- 10 salidas PWM
- 2x I2C
- 3x ADC (VBAT, corriente, RSSI)
- Inversor incorporado para entrada SBUS
- USB tipo C (USB2.0)
Firmware FC
- ArduPilot: MatekF405-Wing (ArduPlane 4.4 o posterior)
- INAV: MATEKF405SE (INAV 6.0 o más reciente)
PDB
- Rango de voltaje de entrada: 9~30V (3~6S LiPo) con protección TVS
- Señor de corriente: 220 A, 3,3 V ADC (escala INAV 150, ArduPilot 66,7 A/V)
- Resistencia de detección: 100 A continuo, 220 A pico
- Divisor de voltaje de batería 1K:10K (Escala 1100 en INAV, BATT_VOLT_MULT 11.0 en ArduPilot)
Salida BEC 5V
- Diseñado para controlador de vuelo, receptor, OSD, cámara, zumbador, 2812 LED_Strip, zumbador, módulo GPS, AirSpeed
- Corriente continua: 2 amperios
Salida BEC de 9V/12V
- Diseñado para transmisor de vídeo, cámara, cardán, etc.
- Corriente continua: 2 amperios
- Opción de 12 V con puente
- para una salida estable de 9 V/12 V, el voltaje de entrada debe > voltaje de salida +1V
Salida BEC Vx
- Diseñado para servos
- Voltaje ajustable, 5 V predeterminado, opciones de 6 V o 7,2 V
- Corriente continua: 5 amperios, pico 6 A
- para una salida Vx estable, el voltaje de entrada debe > Tensión Vx +1V
Salida BEC de 3,3 V
- Diseñado para periféricos externos de 3,3 V.
- Regulador lineal
- Corriente continua: 200 mA
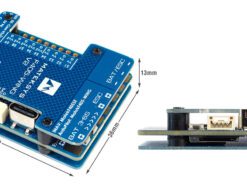
Físico
- Montaje: 30,5 x 30,5 mm, Φ4 mm con ojales Φ3 mm
- Dimensiones: 54x36x13mm
- Peso: 25g
Incluido
- 1x F405-Ala-V2
- 1 cable JST-GH-4P a JST-GH-4P de 20 cm para puerto I2C
- Dupont 2,54 pines (La placa se envía sin soldar)
Sé el primero en valorar “Controladora de vuelo Matek WING 405 V2 Inav-ardupilot”
Productos relacionados




$75,000
Promo

Promo

Valoraciones
No hay valoraciones aún.