






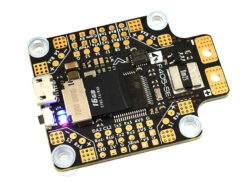

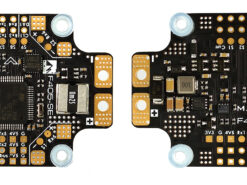

Controladora Matek 405-SE
$235,000
Agotado
Especificaciones
- MCU: 168 MHz STM32F405RET6
- IMU: MPU6000 (SPI)
- Baro: DPS310 (I2C)
- OSD: AT7456E (SPI)
- Caja negra: ranura MicroSD (SPI)
- VCP y 6x Uarts, 1x Softserial_Tx compatible
- 9x salidas PWM (7x Dshot compatible con BF / INAV)
- 2x I2C
- 3x ADC (voltaje, corriente, RSSI)
- 4 almohadillas RX6 (una por esquina) para telemetría BLheli32 ESC
- 4x almohadillas de señal / potencia ESC individuales
- 1x grupo de pads G / S1 / S2 / S3 / S4 para señal ESC 4in1 / GND
- 3 LEDs para FC STATUS (azul, verde) e indicador de 3.3V (rojo)
- Inversor integrado en UART2-RX para entrada SBUS
- PPM / UART compartido: UART2-RX
- Potencia de salida filtrada vbat para VTX
- Control de cámara: si
- Protocolo Smartaudio & Tramp VTX: Sí
- Protocolo DJI FPV OSD: Sí
- Tira de LED WS2812: Sí
- Beeper: si
- RSSI: sí
Especificaciones PDB
- Entrada: 6 ~ 36V (2 ~ 8S LiPo) con protección TVS
- PDB: 4x35A (máximo 4x46A)
- BEC: 5V 2A cont. (Máx.3A)
- LDO 3.3V: máximo 200mA
- Sensor de corriente 184A (escala 179 en INAV / BF)
- Sensor de voltaje de la batería: 1 K: 10 K
Firmware
- INAV: MATEKF405SE
- BetaVuelo: MATEKF405SE
- ArduPilot: MATEKF405-WING
Físico
- Montaje: 30,5 x 30,5 mm, Φ4 mm con ojales Φ3 mm
- Dimensiones: 36 x 46 mm
- Peso: 10g
Incluso
- 1x F405-SE
- 6x arandelas de silicona M4 a M3
- 1x placa PCB FR4 36 * 36 * 1 mm
- 1x Rubycon ZLH 35V / 470uF (ESR bajo)




Valoraciones
No hay valoraciones aún.