









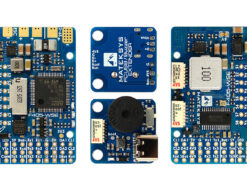


Controladora Matek F405-WSE (Especial para Aviones inav/ardupilot)
$310,000
Agotado
Especificaciones FC
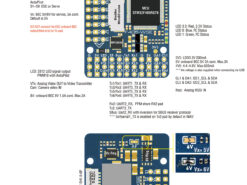
- MCU: Flash de 168MHz STM32F405RGT6 1MB
- IMU: MPU6000 (SPI1)
- Baro: DPS310 (I2C1)
- OSD: AT7456E (SPI2)
- Caja negra: toma MicroSD (SPI3)
- VCP y 6x UART,
- 1x opción Softserial_Tx (pad TX2, INAV)
- 10 salidas PWM (S1 ~ S9, LED)
- 2x I2C
- 3x ADC (voltaje, corriente, RSSI)
- 3 LEDs para FC STATUS (azul, verde) e indicador de 3.3V (rojo)
- Inversor integrado en UART2-RX para entrada SBUS
- PPM / UART compartido: UART2-RX
- 1x conector SH1.0_6pin (4V5 / G / TX4 / RX4 / DA2 / CL2) para GPS / brújula
- 1x conector SH1.0_6pin para USB externo y zumbador
- DJI FPV OSD: cualquier UART de repuesto
- FrskyOSD: cualquier UART de repuesto
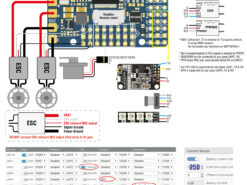
Poder
- ENTRADA 6 ~ 30 V CC (2 ~ 6 S LiPo)
- Sentido de corriente de alta precisión 132A (escala 250)
- Resistencia de detección de corriente / PDB: 60A continuo, ráfaga de 132A.
- BEC 5V 2A para FC y periféricos
- BEC Vx 5A para servos, opción 5V / 6V
- BEC 8V 1.5A para VTX y cámara
- LDO 3.3V 200mA
- Sensor de voltaje de la batería: 1k: 10k
Firmware de FC
- Destino INAV: MATEKF405SE
- ArduPilot hwdef: MATEKF405WING
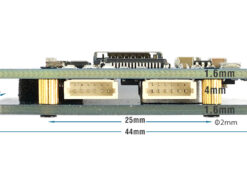
Físico
- Dimensiones: 44 x 29 x 10 mm
- Montaje: 25 x 25 mm, Φ2 mm
- Peso: 20 g con placa inferior y adaptador USB / zumbador
Incluso
- 1x FC F405-WSE
- 1x adaptador USB (tipo C) / zumbador (activo)
- 1x placa inferior, 44 x 29 mm
- 2 cables JST-SH-6P a JST-SH-6P, 20 cm
- 5x separadores de latón, M2 * 4 mm
- 10 tornillos, M2 * 3,5 mm
- Pines Dupont 2.54 (la placa se envía sin soldar)
Sé el primero en valorar “Controladora Matek F405-WSE (Especial para Aviones inav/ardupilot)”
Productos relacionados



Promo

Promo
Valoraciones
No hay valoraciones aún.