








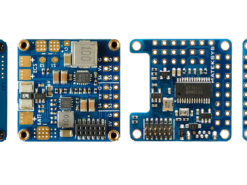
Controladora Matek F411-WSE INAV
$213,000
Agotado
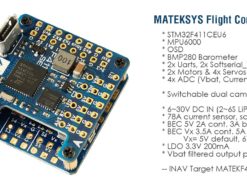
MCU: 100MHz STM32F411CEU6
IMU: MPU6000 (SPI)
Baro: BMP280 (I2C)
OSD: AT7456E (SPI)
Blackbox: no
2x Uarts
2x Softserial-Tx
2 motores, 4 salidas de servos
1x I2C
4x ADC (VBAT, Actual, RSSI, AirSpeed)
3x LED para FC STATUS (Azul, Rojo) e indicador de 3.3V (Rojo)
Entradas de cámara dual conmutables
TR/SA VTX control: Yes
Control LED WS2812: Sí
Salida de busca: sí
RSSI: sí
Divisor de voltaje para sensor de velocidad analógico: sí
Firmware FC
Objetivo de INAV: MATEKF411SE
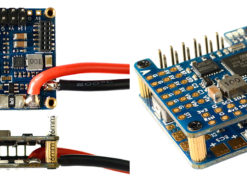
PDB
Rango de voltaje de entrada: 6 ~ 30V (2 ~ 6S LiPo)
2x almohadillas de alimentación ESC
Sensor de voltaje de la batería: 1:10 (escala 1100)
Señor actual: 78A, 3.3V ADC, Escala 423
Salida BEC 5V
Diseñado para controlador de vuelo, receptor, cámara, zumbador, 2812 LED_Strip, zumbador, módulo GPS, módulo AirSpeed
Corriente continua: 2 amperios, Max.3A (5 segundos / minuto)
Salida BEC Vx
Diseñado para servos
Voltaje ajustable, 5V predeterminado, opción de 6V
Corriente continua: 3.5 Amps, Max.5A (5 segundos / minuto)
Salida BEC 3.3V
Diseñado para Baro / Módulo de brújula / OLED y Spektrum RX
Regulador lineal
Corriente continua: 200mA
Físico
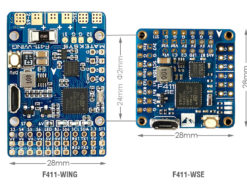
Montaje: 24 x 24 mm, Φ2 mm
Dimensiones: 28 x 28 x 14 mm.
Peso: 8.5g
Sé el primero en valorar “Controladora Matek F411-WSE INAV”
Productos relacionados






Valoraciones
No hay valoraciones aún.