










Controladora Matek Wing H743 V3
$490,000
1 disponibles
POR FAVOR EL RIMER PASO ANTES DE MANIPULAR (SOLDAR) LA CONTROLAORA ES CONECTARLA POR USB AL PC Y VERIFICAR QUE FUNCIONA PARA REALIZAR PROCESO DE GARANTIA SI HAY ALGUN PROBLEMA CON LA FC.
ACTUALIZACION V3
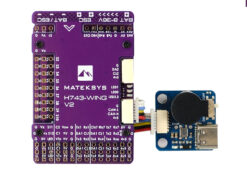
- H743-WING-V2 (PCB púrpura) se ha actualizado a V3 (PCB azul) desde finales de abril de 2022.
- IMU ICM42688-P(V3) +ICM42605 en lugar de MPU6000(V2) +ICM42605
- Mismas funciones, diseño, esquema de cableado y asignación de E/S.
- Más detalles, por favor lea «Consejos y notas»
- http://www.mateksys.com/?portfolio=h743-wing-v2#tab-id-7
Especificaciones FC
- MCU: STM32H743VIT6, 480 MHz, 1 MB de RAM, 2 MB de memoria flash
- IMU: MPU6000 (SPI1) e ICM42605 (SPI4)
- Baro: Infineon DPS310 (I2C2)
- OSD: AT7456E (SPI2)
- Blackbox: Ranura para tarjeta MicroSD (SDIO)
- 7x Uarts (1,2,3,4,6,7,8) con inversión incorporada.
- 13 salidas PWM (incluida la almohadilla «LED»)
- 2x I2C
- 1 lata
- 6x ADC (VBAT, actual, RSSI, AirSpeed analógico, VB2, CU2)
- 3x LED para FC STATUS (Azul, Rojo) e indicador de 3.3V (Rojo)
- 1x ruptura SPI3
- Extensor de pitido/USB con tipo C (USB 2.0)
- Interruptor de entrada de cámara dual
- 5 V/9 V (12 V) para cámara/interruptor de alimentación VTX
- Detección de corriente de alta precisión (90 A continuos, pico de 220 A)
- Sensor de voltaje de la batería: 1K:10K (Escala 1100 en INAV, BATT_VOLT_MULT 11.0 en ArduPilot)
- Divisor de voltaje ADC VB2: 1K: 20K
- Divisor de voltaje ADC AirSpeed: 20K:20K
- Potencia estática 160mA@5V
Firmware FC
- ArduPilot (ChiBiOS): MATEKH743
- INAV: MATEKH743
AP
- Rango de voltaje de entrada: 8~36V (3~8S LiPo) con protección TVS
- 2 almohadillas de potencia ESC
- Sensor de Corriente: 220A, 3.3V ADC (Escala 150 en INAV, 66.7 A/V en ArduPilot)
- Resistencia de detección: 90A continua, pico de 220A.
Salida BEC 5V
- Diseñado para controlador de vuelo, receptor, OSD, cámara, zumbador, 2812 LED_Strip, zumbador, módulo GPS, AirSpeed
- Salida 5,15 +/- 0,1 V CC
- Corriente continua 2 amperios, pico 3A
Salida BEC 9V /12V
- Diseñado para transmisor de video, cámara, cardán, etc.
- Corriente continua 2 amperios, pico 3A
- Opción de 12 V con almohadilla de puente
Salida BEC Vx
- Diseñado para servos
- Voltaje ajustable, 5 V por defecto, 6 V o 7,2 V mediante puente
- Corriente continua 8 Amperios, 10A Pico
Salida BEC 3.3V
- Regulador lineal
- Corriente continua: 200mA
Físico
- Montaje: 30,5 x 30,5 mm, Φ4 mm con ojales de Φ3 mm
- Dimensiones: 54 x 36 x 13 mm
- Peso: 30 g con extensor USB
Incluso
- 1x H743-ALA
- 1 extensor USB (Tipo C)/Beep (zumbador pasivo)
- 1 cable JST-SH-6P a JST-SH-6P de 20 cm para extensor USB.
- 2 cables de 20 cm JST-GH-4P a JST-GH-4P para puerto CAN e I2C
- 1x Condensador Rubycon ZLH 35V 470uF
- Dupont 2.54 pines (La placa se envía sin soldar)
Novedades del H743-Wing V2
- Utilice ICM42605 en lugar de ICM20602
- Se movió PDB/sensor de corriente de la placa FC a la placa inferior.
- Se movió 8A BEC del tablero superior a la placa inferior.
- Conector JST-GH para puerto CAN en lugar de conector JST-SH.
- Agregue un conector JST-GH para I2C2, para plug and play con ASPD-4525
ArduPilot
- H743-WING-V2 con ICM42605 es compatible con ArduPilot 4.1 más reciente o posterior,
- ICM42605 se define como la primera IMU (IMU0), MPU6000 es la segunda (IMU1).
- con ArduPilot 4.1 o superior, establezca INS_ENABLE_MASK en 7 o por defecto en 127.
- El rango actual del sensor es 220A en H743-WING-V2, asegúrese de configurar BATT_AMP_PERVLT en 66.7
- Se recomienda utilizar STM32CubeProgrammer para borrar MCU y cargar firmware. consulte este blog http://www.mateksys.com/?p=6905
- Problema conocido y solución, H7 no se inicializará con el firmware de Ardupilot
INAV
- El rango del sensor de corriente es 220A en H743-WING-V2, asegúrese de configurar la escala del medidor de corriente en 150
- IMU ICM42605 es compatible con INAV3.0.2 o superior.
- MPU6000 es la primera IMU (IMU0, predeterminada), ICM42605 es la tercera IMU (IMU2) en el objetivo INAV MATEKH743.
- Si desea probar la nueva serie ICM-4 de IMU. descargar inav_3.0.2_MATEKH743.hex
- establecer gyro_to_use = 2
- establecer acc_hardware = icm42605
- ahorrar
- Si se queda solo con MPU6000, H743-WING-V2 también funciona con la versión estable 3.0.x descargada del configurador.
- La tarjeta SD y el modo MSC para H743 no se implementaron en INAV3.x. Son compatibles con INAV4.xo superior.
Otros
- Si los ESC que está utilizando no tienen suficientes condensadores integrados, se requiere un condensador electrolítico ESR bajo para reducir el ruido del ESC.
Sé el primero en valorar “Controladora Matek Wing H743 V3”
Productos relacionados


Promo



$75,000
Valoraciones
No hay valoraciones aún.